Insertion Sort
Chapter 2 introduces insertion sort, an algorithm that solves the sorting problem mentioned in a previous chapter.
INSERTION-SORT(A) cost times for j = 2 to A.length c1 n key = A[j] c2 n-1 // Insert A[j] into the sorted sequence A[1..j-1]. 0 n-1 i = j - 1 c4 n-1 while i > 0 and A[i] > key c5 Σ(j=2 to n) tj A[i+1] = A[i] c6 Σ(j=2 to n) tj - 1 i = i - 1 c7 Σ(j=2 to n) tj - 1 A[i+1] = key c8 n-1
Basically, algorithm divides the sequence in two parts. The left part A[1…j-1] constitutes the currently sorted subarray and the right part is a subarray A[j+1…n] that corresponds to the numbers to be sorted. What you want to do is to pick an element (starting from 2), go down the array and try to find a good spot to fit the number in, at the same time copying the values one place over to have a free slot for insertion.
Analyzing algorithms
T(N) = c1*n c2(n-1) +c4(n-1) +c5Σj +c6Σ(tj-1) +c7Σ(tj-1) +c8(n-1).
Algorithm’s running time does depend on the input. For example, if the input array is sorted, we would have A[i] key when i has its initial value of j-1. Thus tj = 1 for j = 2, 3 … n and the T(N) would be:
T(N) = c1n +c2(n-1) +c4(n-1) +c5(n-1) +c8(n-1) = (c1+..c8)n - (c2+c4+c5+c8) = Cn - c
This clearly looks like a linear function of n.
Another example, array is in reverse sorted order, then we must compare the entire left subarray which would make tj = j for j = 2, 3 … n. Consequently, T(N) would look like:
T(N) = c1n +c2(n-1) +c4(n-1) +c5(n(n+1)/2-1) + c6(n(n-1)/2) + c7(n(n-1)/2) +c8(n-1)
= Cn2 + Cn - c
This clearly looks like a quadratic function of n.
Notice that Σ(j=2 to n)[j] = n(n+1)/2-1 and Σ(j=2 to n)[j-1] = n(n-1)/2
When we try to analyze algorithms, we usually only care about finding the worst-case running times. Why?
To denote the worst case we write the running time of Θ(n2) (pronounced “theta of n-squared”) which represents a rate of growth or order of growth. We can ignore the lower-order terms because they are relatively insignificant for large values of n. All we care about is the leading term of the formula (e.g., cn2).
Algorithm Design & Mergesort
Sometimes, we can come up with a different approach to tackle the same problem. So far we used an incremental approach: to sort the subarray A[1…j-1], we inserted a single element A[j] into its proper place, yielding the sorted subarray. A different way of doing things would be using divide-and-conquer method: break the problem into several subproblems that are similar to the original problem but smaller in size, solve the subproblems recursively, and finally combine these solutions to create a solution to the original problem. Mergesort algorithm would be a good example of this.
Divide: Divide the n-element sequence to be sorted into two subsequences of n/2 elements each.
Conquer: Sort the two subsequences recursively using merge sort.
Combine: Merge the two sorted subsequences to produce a fully sorted sequence.
The following MERGE function merges two sorted subarrays A[p..q] and A[q + 1..r] where p ≤ q ≤ r. It merges them to form a single sorted subarray that replaces the current subarray A[p..r]. Since we perform at most n steps, where each step is just a comparing of two elements from left and right subarrays, merging takes Θ(N) time.
MERGE(A,p,q,r) n1 = q-p+1 n2 = r-q let L[1..n1+1] and R[1..n2 +1] be new arrays for i = 1 to n1 L[i] = A[p+i-1] for j=1 to n2 R[j] = A[q+j] L[n1+1] = inf L[n2+1] = inf i = 1 j = 1 for k = p to r if L[i] <= R[j] A[k] = L[i] i = i + 1 else A[k] = R[j] j = j + 1
Now we can use merge procedure as a subroutine in the merge sort algorithm. The procedure sorts the elements in the subarray A[p..r]. If p ≥ r the subarray has at most one element and is therefore already sorted. Otherwise, the divide step simply computes an index q that partitions A[p..r] into two subarrays: A[p..q], containing ceil(n/2) elements and A[q+1..r], containing floor(n/2) elements.
MERGE-SORT(A,p,r) if p < r q = floor((p+r)/2) MERGE-SORT(A,p,q) MERGE-SORT(A,q+1,r) MERGE(A,p,q,r)
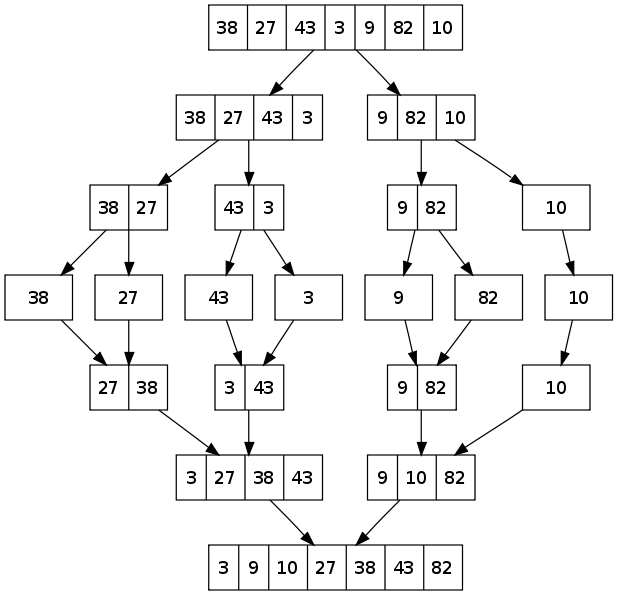
To sort an entire array, we make the initial call MERGE-SORT(A,1,A.length). The algorithms goes all the way to the bottom, merges pairs of 1-item seqs to form sorted seqs of length 2, merges pairs of seqs of length 2 to form sorted seqs of length 4 and so on, until two sequences of length n/2 are merged to form the final sorted sequence of length n.
Runtime Complexity
T(n) is either going to be Θ(1) if n ≤ c or aT(n/b) + D(n) + C(n).
In our case:
1) D(n) is Θ(1) operation (finding q) [Divide]
2) We recursively solve two subproblems, each of size n/2, which contributes to 2T(n/2) to the running time [Conquer]
3) We have seen that MERGE takes Θ(N) time on n-element subarray so C(N) = Θ(N) [Combine]
Thus, we get T(n) = Θ(1) [if n ≤ c] or 2T*(n/2) + Θ(n) [if n > 1]
So what exactly is 2T*(n/2)? To find it out, let’s refer to a recursion tree to better understand the first term.
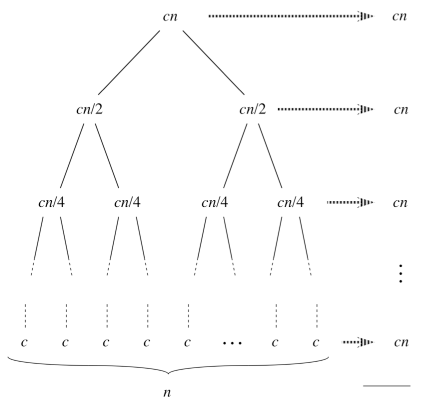
First level takes cn time.
Second level takes 2(cn/2) = cn.
Third level takes 4(cn/4) = cn.
To find out the total running time we need to sum up all the costs on each level. How do we know the number of levels?
Then, our recursion tree has lgn + 1 levels, each costing cn, for a total of cn(lgn + 1) = cnlgn + cn.
Substitute this in our previous T(n) equation and we get:
T(n) = Θ(1) [if n ≤ c] or cnlgn + cn + Θ(n) = Θ(nlgn) [if n > 1].
This is a much better runtime complexity than the insertion sort we looked at earlier.